MRTD(最小可分辨温差)是一个主观参数(函数),描述了成像仪-人类系统在不同对比度和不同尺寸的参考目标下,分辨目标细节的能力。具体来说,它是一个函数,表示分辨标准4条条纹目标(条纹的长宽比为7)与背景之间的最小温差,在不同空间频率下观察者仍然能够分辨出条纹的温差。空间频率被理解为4条条纹目标中一对条纹的反向角度大小。
MRTD(最小可分辨温差)是一个主观参数(函数),描述了成像仪-人类系统在不同对比度和不同尺寸的参考目标下,分辨目标细节的能力。具体来说,它是一个函数,表示分辨标准4条条纹目标(条纹的长宽比为7)与背景之间的最小温差,在不同空间频率下观察者仍然能够分辨出条纹的温差。空间频率被理解为4条条纹目标中一对条纹的反向角度大小。
MRTD通常通过人工分析图像中的4条条纹目标来测量,该目标具有可变的温差(图43-44)。观察者的任务通常是找到一个最小的温差值,使得他在仍能分辨出条纹的情况下,能够分辨给定空间频率的目标。他应该能够看到所有四条条纹,尽管并不需要一直看到这些条纹。最优温差(MRTD值)是通过对一系列温差值进行实验得出的。该程序同时对正对比度和负对比度的4条条纹目标进行,计算出平均值。之后,对于其他4条条纹目标(空间频率),会重复进行这个过程。建议在5-6个空间频率下测量MRTD,以准确确定MRTD函数。如果热成像仪在多个视场(FOV)下工作,那么每个视场都需要重复测试。
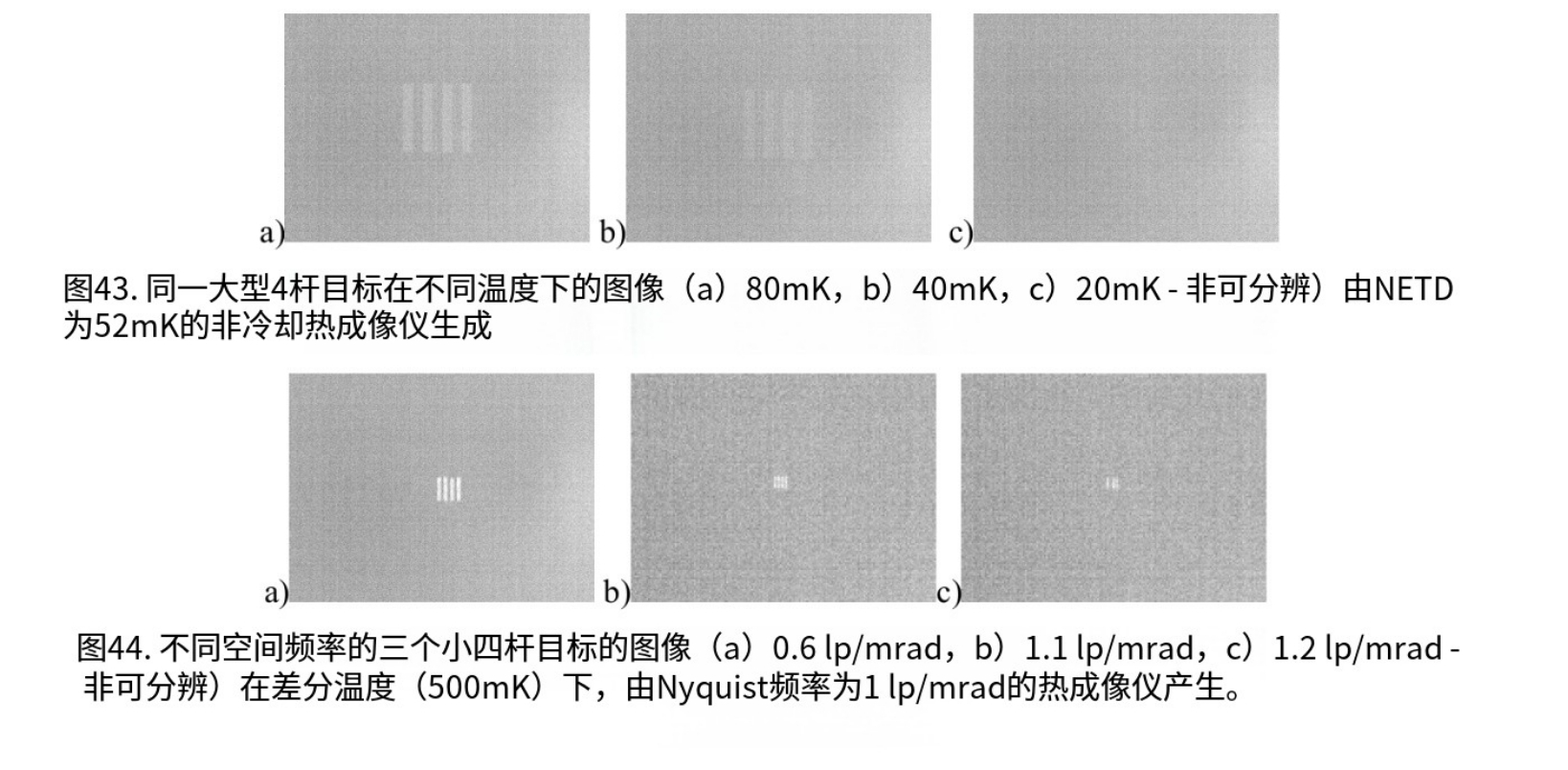
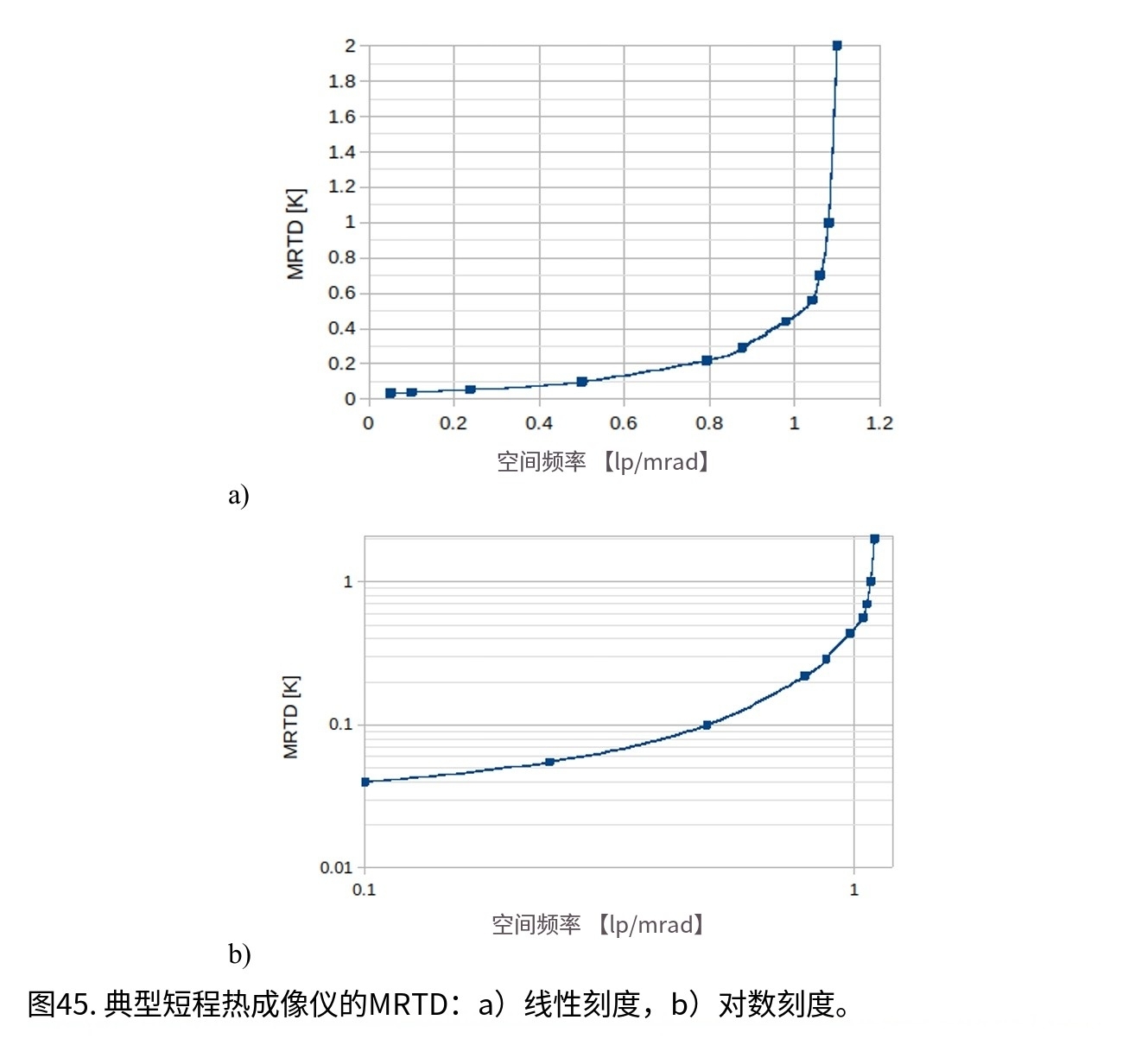
通过重复测量使用不同空间频率的4条条纹目标的MRTD,可以创建类似图45所示的二维函数。X轴是测量中使用的4条条纹目标的空间频率。Y轴是分辨4条条纹目标所需的最小温差值。常见的挑战是准确测量接近Nyquist频率的空间频率下的MRTD(接近图45中的垂直渐近线),因为目标空间频率的微小变化会产生显著不同的MRTD值。这种情况需要拥有非常长的一系列不同空间频率的4条条纹目标,以便能够准确测量市场上各种热成像仪的MRTD。
这主要有三个原因:
测量概念容易理解,且测试结果易于直接解释,
MRTD提供了整个系统(成像仪和人类观察者)性能的信息,
MRTD提供了热成像仪在面对三大类目标(在实际工作条件下遇到的目标)的性能信息:低温差的大型目标、中等温差的中型目标和高温差的小型目标。
因此,MRTD是常被测量的热成像仪参数。
热像仪MRTD测试系统推荐:

DT热像仪测试系统系列是专为在实验室和仓库条件下对热成像仪及其核心组件进行全面测试和瞄准而设计的测试系统。
该系统采用模块化设计,能够根据不同的测试需求和预算,配置出不同设计下具有不同测试能力的系统,能够对市场上几乎所有类型的热成像仪进行广泛的测试。
所测试的热成像仪位于红外准直器的输出端,看到的是由准直器投影的图像。测试目标与测试热成像仪之间的光学距离非常短(大约是准直器的两倍焦距)。这样的距离通常低于典型监控热成像仪的对焦范围。然而,由于使用准直器作为图像投影器,热成像仪“看到”的目标就像位于一个非常远的地方,即光学无穷远,测试就是模拟这种超长距离对焦。
可测试能力
1 MRTD(最小可分辨温差)
2 NETD(噪声等效温差)
3 MTF(调制传递函数)
4 FOV(视场)
5 SiTF(信号传递函数)
6 Distortion(畸变)
7 FPN(固定模式噪声)
8 3D-Noise
9 Bad pixels(像素坏点)
10 Magnification(放大倍数)
11 Response function(响应功能)
12 MDTD(最小可检测温差)
13 MTDP(感知最小温差)
14 AutoMRTD(自动最小可分辨温差)
15 VirtMRTD(虚拟MRTD)
16 NPSD(噪声功率谱密度)
17 PVF(点可见性系数)
18 SRF(狭缝响应功能)
19 SNR(信噪比)
20 NER(噪声等效辐射)
21 NEI(噪声等效辐照度)
22 NEP(噪声等效功率)
23 D*(归一化检测率/比探测度)
24 Non-uniformity(非均匀性)





